
The Future of Brakes – Brake Systems of the Future
Brake systems are becoming increasingly intelligent so they can meet the future needs and requirements of automated driving and electrification; and this in newly conceived vehicles designed with modified architecture. This functional extension requires a profound understanding of the system in order to combine uncompromising safety and sustainability in future brake systems – and in the long term also modular and distributed brake systems.
Vehicle Architecture is changing
First of all, regardless of the architecture of vehicles and future brake systems, brakes remain the single most important element of active driving safety. Reliability is the name of the game here, and compromises are one thing brake manufacturers do not make. This mindset among the experts and the know-how that has grown over decades will become even more important in the future when it comes to equipping brakes for future requirements and maintaining absolute trust in them: The importance and appreciation of braking as a function remain untouched. Yet, just about everything else is beginning to change.
Vehicles are currently being reconceived. Global megatrends are driving these efforts: Vehicle architecture is changing with the electrification of the powertrain and the growing capabilities of automated driving (AD). Digitalization and connectivity are fundamentally realigning the electrical and electronic architecture (E/E architecture) of vehicles, which is increasingly based on software – because it’s the software which, in future, will define the character of cars and the driving experience! Bits take the place of horsepower. Apps and services are expanding the car into an immersive experience that’s steadily becoming safer and more comfortable.
What does this all mean for brakes? Changes – and, in part, radical changes in the long term! Looking back helps us understand that brake systems to date have primarily been mechanical systems with vacuum brake boosters and hydraulic power transmission from the brake pedal to the wheel brake (entailing pressure generation, valves, lines, brake calipers and drum brakes). Electronic safety systems such as ABS and ESC ensure that brakes proactively contribute to driving safety in borderline situations even without driver intervention. At the same time, brakes must now also contribute to vehicle efficiency – in other words, help prevent CO2 emissions – and, in future, reduce particulate emissions during friction braking.
With digitalization and connectivity, electric drives and AD capabilities, brake systems must therefore fulfill a broad number of additional tasks. To this end, Continental, as a long-standing, globally-proven brake system specialist, is developing future brake system technologies: Future Brake Systems (FBS). A journey into the future of brakes, and an innovation roadmap outlining a far-reaching, step-by-step transformation.
The future began in 2016, and is now reality on the road
The first electrohydraulic brake-by-wireMK C1 brake system developed by Continental went into production back in 2016. It takes up less installation space, consists of fewer components, is lighter and, most importantly, thanks to electromechanical actuation, it builds up brake pressure faster than any conventional hydraulic system – in just 150 ms. This brake system does not require any brake booster and also no longer requires a vacuum pump. This FBS stage (FBS 0) marks the entry into brake-by-wire systems. By decoupling the brake pedal from the physical actuation system, body force is no longer required for effective emergency braking. Unlike systems with a brake booster, dosage of the maximum braking power does not depend on the force in the foot as with the MK C1, meaning that even those who are physically untrained can effortlessly initiate full braking.
But the MK C1 also achieves something else: In vehicles powered by electric motors, when pressing the brake pedal, the driver cannot tell whether the wheel brake is active, or whether the electric motor is operating regeneratively and decelerating the vehicle as desired while generating electricity in the process (recuperation). The pedal always feels the same because the pedal response (i.e. “pedal feel”) is constantly simulated. Intelligent brake systems do not necessarily do what drivers directly request, but rather what they intend to do: deceleration. This constitutes a major advance in vehicle efficiency that “burns” as little of the vehicle’s kinetic energy as possible on the wheel brakes, as this energy is then lost. Starting with the MK C1, the energy recuperation potential can be fully exploited. With an additional module based on the tried-and-tested ESC technology, automated driving according to SAE Level 3 is also possible. For this purpose, all that needs to be adjusted with the MK C1 is the functional scope of the software, which results in very low integration outlay on the part of automotive manufacturers.
In its first production application, the MK C1 system from 2016 still has what is known as a “hydraulic fallback mode”: If a fault occurs (such as complete failure of the onboard electrical system), two valves automatically switch and the driver’s foot pressure generates brake pressure. However, the MK C1 can be used just as well without the hydraulic fallback mode.
FBS 1 – True brake-by-wire technology
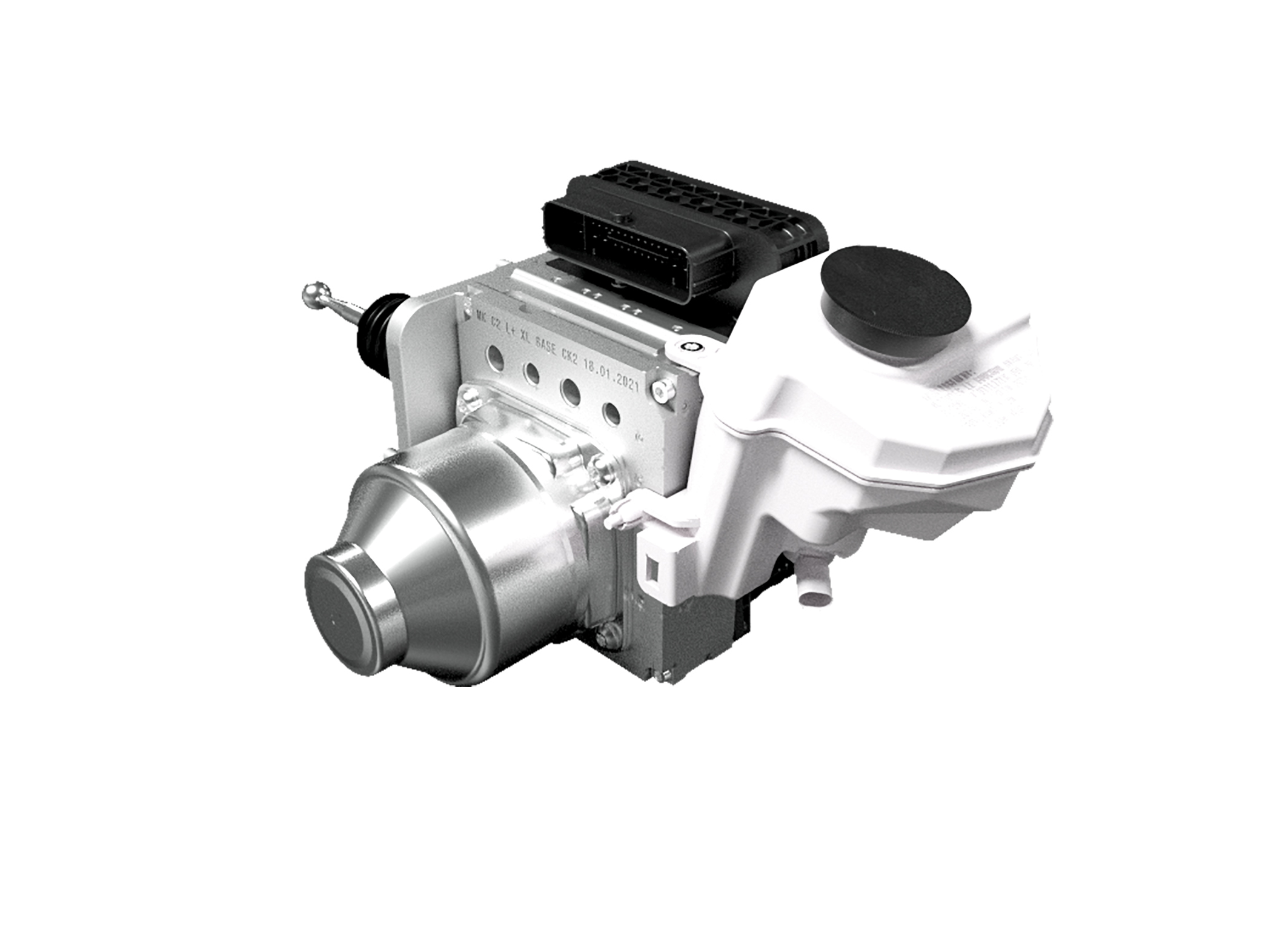
Building on the long experience gained with tried-and-tested electromechanical actuation, the transition to a complete brake-by-wire system can now follow. To this end, Continental has developed the MK C2, a modularized and scalable system generation. The MK C2 can be used both with a mechanical pedal (= and hydraulic fallback mode) as well as with an electronic pedal (= without fallback mode, as the MK C2 EP version).
The MK C2, however, as a more advanced development, is even more compact, lighter and more cost-effective and, thanks to Multi-Logic, has performance characteristics superior to those of the MK C1. Multi-Logic means that the MK C2 features two printed circuit boards and two processors that can be used to uphold more functions in the event of a fault. This means, for example, that the parking brake can be actuated redundantly. This makes it possible to dispense with a highly expensive mechanical transmission lock for immobilizing the vehicle. Owing to its benefits, the MK C2 evolutionary stage will form the basis for future FBS. In the version without fallback mode, the driver depresses a simulated brake pedal (electronic pedal feature). Sensors capture the braking intent, and an electric motor generates the hydraulic pressure. The MK C2 system generation is designed for AD in accordance with SAE Level 3 or higher. Since it is a requirement that brake systems without hydraulic fallback mode must be designed redundantly, FBS 1.1 is a smart solution suitable for small to medium unit volumes. It uses existing components that have already proven themselves in the solution with a mechanical pedal for higly automated driving (HAD). For larger unit volumes, the development of a redundant “OneBox” presents a good solution.
The complete separation of pedal and pressure generation without fallback mode provides a huge advantage for integration, which is characteristic of real brake-by-wire systems: The brake system no longer has to be mounted directly at a specific location on the firewall in front of the driver to enable mechanical fallback. Instead, an FBS 1 with electronic pedal supports new vehicle concepts involving different vehicle interiors and dimensions, such as the skateboard chassis of electrified vehicles, on which various bodies can be mounted.
FBS 2 – The brakes become “semi-dry”
In today’s brake systems, as well as with FBS 0 and FBS 1 solutions, pressure generation is still fully integrated into the brake system unit. The hydraulics (i.e. the “wet” part of the brake system) transmit the force to the brake calipers of the disk brakes or the drum brakes.
However, the more E/E architecture and vehicle architecture evolve, the more attractive it becomes to eliminate this inflexible “one-box arrangement”. A first step, for example, could be to no longer actuate the brakes hydraulically on the rear axle, because hydraulics have a disadvantage: The fluid has to be changed and disposed of regularly – which is not environmentally sustainable. Moreover, if the brakes were actuated electromechanically, installation of the rear axle would be simplified because rigid hydraulic lines could be dispensed with. At the same time, the hydraulics on the front axle would still be available as a fallback system.
If the rear axle wheel brakes are operated electromechanically, i.e. “dry”, this could be utilized regeneratively, for example for systematic energy recuperation at the rear axle during each braking operation. Once the rear axle brakes become independent of the hydraulic system, they provide the ideal conditions for this. This would require a certain degree of “intelligence” in the brake system. This decentralization and “breaking-up” of the conventional architecture would further increase the degree of freedom for vehicle architectures.
FBS 3 – The brake can be broken up into modules
In a very long-term view, the hydraulic system could be eliminated completely: To achieve this, all four wheel brakes could be actuated electromechanically and would thus be completely “dry”. The current focus on pressure generation and modulation with appropriate control intelligence would then no longer be necessary. An FBS 3 brake system consists of four dry wheel brakes (calipers or drums) and a series of software function blocks which, for reasons of safety and redundancy, can run on several of the existing high-performance computers (HPC) with integrated Wheel Control Units providing the redundancy required for safety.
To make this long-term transformation to FBS 3 possible at all, the individual functions of a brake system must be encapsulated as stand-alone products in modular, validated and proven software blocks that can be integrated into various vehicles thanks to standardized interfaces based on the principle of re-use.
Conclusion
Motion functions remain the cornerstone of active driving safety. Nowhere is that clearer than in brake systems. At the same time, however, the general conditions for motion control functions are changing very significantly due to the new E/E architecture and new vehicle capabilities such as AD. Here, Continental is actively seeking to exchange ideas with vehicle manufacturers in order to shape the further development of brake systems in dialog with them. This is all the more important because many of the advantages of future systems will be less significant for brake functions than for the vehicles themselves.
Thinking in terms of isolated functional units and hardware units no longer works. New brake system architectures will very likely be modular and scalable. In future, it will be possible to modularize brake systems. Previously centralized components could then be positioned more freely in the vehicle. Development in this area is underway, and it is based on decades of experience with safety-relevant systems. This expertise and the associated mindset flow into collaborative and coordinated development work that goes beyond previous domain boundaries. This safety thinking in the context of overall systems is also supported by Continental’s extensive expertise in architectures involving high-performance computers (HPC) combined with other integrated control units ensuring redundancy and fallback.
Examples here include Wheel Control Units, Safety and Motion Integration Platform and Automated Driving HPC. Greater safety, driving comfort and reliability despite new system properties and new, distributed architectures can thereby be ensured.

Sören Pinkow
Media Spokesperson Autonomous Mobility and Commercial Vehicles
Continental Automotive








